Robotic RL — Gabriel Vallat and Jingwen Wang - CRCL and Sycamore
Photo Gallery
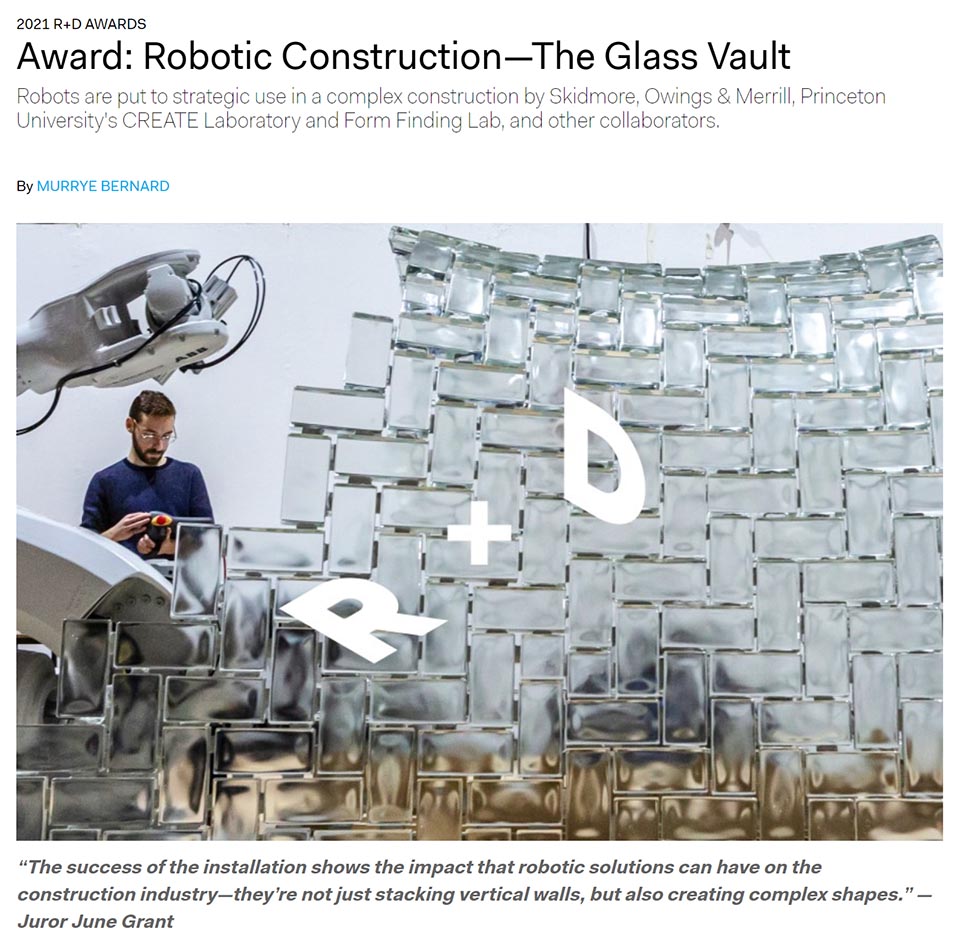
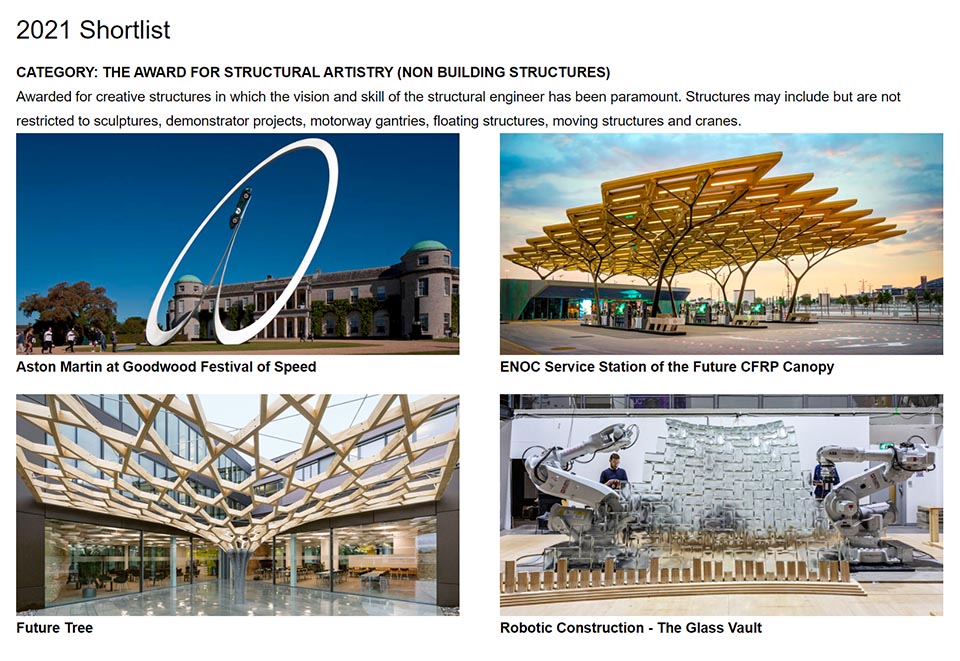
Digital Upcycling — a structural wall from reclaimed concrete rubble. Image credit: Maxence GrangeotSocial Signals — an interactive media installation that guides pedestrians through public space. Image credit: Mathias BernhardLightVault — project in collaboration with Skidmore Owings & Merrill and Form Finding Lab Princeton, (with support of Glass and Transparency Research Group at TU Delft, Universidad de Alcalá, the Timbrel Vault Workshop, Global Robots, and Poesia Glass). Image credit: Shenhan ZhuDigital Upcycling — a structural wall from reclaimed concrete rubble. Image credit: Maxence GrangeotBamX — project in collaboration with GCM, ITKE University of Stuttgart, and Alison Martin. Image credit: Ying ChenSocial Signals — an interactive media installation that guides pedestrians through public space. Image credit: Mathias BernhardLightVault — project in collaboration with Skidmore Owings & Merrill and Form Finding Lab Princeton, (with support of Glass and Transparency Research Group at TU Delft, Universidad de Alcalá, the Timbrel Vault Workshop, Global Robots, and Poesia Glass). Image credit: Shenhan ZhuLightVault — project in collaboration with Skidmore Owings & Merrill and Form Finding Lab Princeton, (with support of Glass and Transparency Research Group at TU Delft, Universidad de Alcalá, the Timbrel Vault Workshop, Global Robots, and Poesia Glass). Image credit: Shenhan ZhuDigital Upcycling — a structural wall from reclaimed concrete rubble. Image credit: Maxence GrangeotLightVault — project in collaboration with Skidmore Owings & Merrill and Form Finding Lab Princeton, (with support of Glass and Transparency Research Group at TU Delft, Universidad de Alcalá, the Timbrel Vault Workshop, Global Robots, and Poesia Glass). Image credit: Isla Han and Edvard Bruun.
About
The Lab for Creative Computation - CRCL /ˈsəːkl/ - seeks to put forward non-linear construction processes that employ digital means from a human-centric perspective.
We explore new construction modes that combine robotics with human interventions and digital media, in pursuit of more creative solutions to contemporary design and construction challenges.
We question the linear workflows traditionally present in construction that promote digital means in pursuit of automating human labor, pushing humans into low-skill work or monitoring roles. Instead, we push for new modes of interaction where humans and machines support each other, where design evolves with and during construction, and where adaptability is at the core of any process.
Our work targets three fundamental challenges:
the climate crisis - We adapt to available materials and move away from standardized cheap but harmful ones
human labor - We prioritize the human experience over productivity while keeping construction efficient
accessibility and diversity - We strive for intuitive processes that are inclusive toward anyone who wants to engage with construction, regardless of physical abilities, gender, or background.
Showcasing scientific research and the rigor that it requires, combined with a playful and accessible approach to technical topics such as programming and robotics, CRCL strives to break down the barriers for novices to enter the field. We fully embrace experimentation, acknowledging and accepting the failures that inevitably accompany it.
Through this work, we are building towards new interaction experiences between humans and machines, where design and engineering, digital and analog work together.
News
NEW
This September, we are co-organizing a summer school with colleagues from EPFL and ETH. The program is intended for PhD students interested in exploring how uncertainty can become a productive resource through a real-world construction robotics challenge.
The week will combine lectures across design, materials, robotics, and work psychology with a full-scale (1:1) timber build using irregular timber stock and an ABB industrial robot in a human–robot fabrication workflow.
No previous robotics experience is required — only curiosity, openness, and your own perspective on how uncertainty shapes analysis, decision-making, and action in research and practice.
International Students are also welcome to apply.
More details on the program, dates, and registration are available on on the course website
The work explores how design can evolve alongside robotic fabrication, enabling real-time negotiation between design intent and material availability through situated, projection-based interaction.
📄 Co-authored by Eleni Skevaki, Eric Duong, Hong-Bin Yang & Stefana Parascho
🪵🤖📽️
Find us tomorrow at Engineering Industry Day, where we'll be showcasing our latest robotic research and developments at our booth!
📅🏭📅
📸 @Samueldevantery
If you missed the talk from Applied Machine Learning Days, you can catch up with the recording now available on YouTube! Featuring a robot demo prepared by our very own Jingwen and Megi!
📹🎤📹
Join us on Tuesday, February 10th at the Applied Machine Learning Days Intelligence Summit in Lausanne! Stefana Parascho will be giving a keynote on Machine Learning for Autonomous Robotic Construction as part of the session Multimodal Intelligence in the Physical World.
🧠🧠🧠
Stefana's keynote from Swiss Robotics Day, Under Construction: Building with Robots Beyond the Automation Myth is now on YouTube! 🦾📹🦾
Together with Qianqing Wang (EESD Lab – EPFL), Jingwen Wang presented their paper “Dynamic Planning and Assembly for Constructing Mortar-Joint Multi-Leaf Stone Masonry Walls with a Robotic Arm” at IROS 2025! The team built the first load-bearing wall from raw stones and mortar with a robotic arm.
Co-authored by Qianqing Wang*, Jingwen Wang*, Bryan German Pantoja Rosero, Katrin Beyer, and Stefana Parascho.
A proud step toward merging robotic precision and traditional craft in stone masonry!
🪨🤖🪨
Eleni Skevaki and Marirena Kladeftira will present “TimberProxy: A Tangible Human–Robot Interface for Incremental Design and Fabrication of Timber Structures” at ACADIA 2025 in Miami, Florida on Friday, 7 November at 11:15 (local time).
The paper is authored by Eleni Skevaki, Marirena Kladeftira, Ziqi Wang, Sihui Wu, Gudela Grote, and Stefana Parascho.
Join us to explore new interfaces for construction robotics!
We are hiring PhD students! If you are interested in human-robot collaborative workflows for timber construction, apply here now! Application review begins on October 25th.
⚠️⚠️⚠️
Prof. Stefana Parascho will be giving a keynote lecture on Sustainability in Robotics at Swiss Robotics Day 2025! The event brings together leading experts in robotics research and industry, featuring talks, workshops, and demonstrations focused on sustainable robotics solutions.
🇨🇭🤖🌱
We're excited to announce the 10th edition of the Design Modelling Symposium will take place at EPFL Fribourg from 10-12 September 2026! This edition will focus on the shifting relationship between designers and intelligent machines through three key areas: Designing with Materials, Designing with People, and Designing with Ethics.
🇨🇭🚧🇨🇭
Jingwen Wang will be presenting the paper 'Learning to Assemble with Alternative Plans' at SIGGRAPH 2025 in the Robots in the World session! The paper explores robotic assembly planning through disassembly and will be presented today at 9:00am PDT.
🧩🤖🧩
Our Re:Config project is now on display at Time Space Existence 2025 in Venice! The installation showcases our human-robot adaptive workflows for disassembly, repair, and construction of timber structures. Come explore the project at Palazzo Mora until November 23rd!
🏛️🪵🤖
The GIS platform at ENAC is searching for an automation and robotics technician or engineer to complete their team! CRCL works closely with GIS for technical support, so please consider applying if you are interested in working with us.
🦾🛠️🦾
CRCL will be in Venice for Time Space Existence, beginning May 10. Come by to see the structure we are building and adapting with robots as part of Re:Config!
🪵🪚🪵
CRCL in Germany! Maxence presented Structural Concrete Rubble Arrangements at the Design Modeling Symposium 2024 in Kassel
🪨🎤🪨
We're showing 'I am not a robot' at Beta 2024 - the Timișoara Architecture Biennale! Created by Eric Duong, Stefana Parascho, and Zara Pfeiffer, the installation deconstructs our relationships to robots through a recontextualization of behavior, sense, and control
🦾🧠💥
CRCL will be hosting a workshop on human-robot interaction (HRI) as part of this year’s Design Modeling Symposium in Kassel, Germany. The workshop will introduce participants to a novel workflow that enables more dynamic and reconfigurable fabrication processes with HRI. It will include interactive discussions and tutorials aiming to develop technical skills, methods of experimentation, and new creative possibilities! Registration is now open online.
🧑 🤝 🤖
Congratulations to Edvard P. G. Bruun for passing his doctoral examination and being officially awarded the title of PhD! Edvard was co-advised by Prof. Adriaenssens at the Princeton Forming Finding Lab and Prof Parascho at CRCL.
🎉 🎓 🎉
Today marks the completion of Alberto Johnsson’s master's thesis, Digital Woodcraft, conducted with Eleni Skevaki and Stefana Parascho. Congrats to Alberto for an amazing year of work in human craft, robotic precision and material properties for a new woodworking experience!
🦾 👷 🪵
Isla Xi Han and Maxence will be presenting their papers at the upcoming Rob|Arch 2024! Keep an eye on Paper Session 1 for Isla's presentation of “Spontaneous Tensegrity: Exploring Improvisational Design and Robotic Fabrication in Tensegrity Structures” and Paper Session 2 for Maxence's presentation of “Rising from Rubble: Leveraging Existing Construction Tools for Upcycling Concrete Waste into Slender Walls”!
🦾 🎤 🦾
Prof. Parascho was invited to give a lecture on multi-agent robotic processes at the University of Toronto Robotics Institute.
🎤 👩💻 💬
Stefana Parascho is a Scientific Chair at AAG 2023, a multi-disciplinary conference connecting architects, engineers, and computer scientists in academia and industry. Find the conference proceedings online!
🪑 👩 🪑
Congratulations to CRCL PhD Candidate Jingwen Wang, who will be presenting her paper on multi-robotic assembly during AAG 2023!
🦾 🐚 🦾
Congratulations to PhD Candidate Maxence Grangeot, who won the Best Poster Award at CISBAT for his work on structures from reclaimed concrete!
🏆 🏆 🏆
The Future of Construction Symposium 2023 will take place from September 13 to 15 and will feature keynotes, poster sessions, and workshops revolving around human-machine collaborations in design and construction. Find out more and register for full access to on-site events!
🔮 🚧 🔮
CRCL is searching for a postdoctoral researcher for a 2 year project focusing on reconfiguration of timber structures! Learn more about the position opening.
🪵 ♻ 🪵
CRCL is presenting two projects with the opening of POSITIONS tonight at 18:00. Learn more at the event page.
🌍 🏫 🌍
Stefana will be giving her inaugural lecture about design and construction robotics on May 10, from 17:30 to 18:45.
⚠️ ⚠️ ⚠️
Construction Robotics: From Automation to Collaboration by Prof. Dr. Stefana Parascho is available for download online.
🛜 📝 🛜
The proceedings from ACADIA 2021 'Realignments: Toward Critical Computation' have been published and are available for free download or purchase in print.
📚 📥 📚
Congratulations to CRCL external advisee Edvard Bruun, who presented research on robotic dis- and reassembly of timber structures at ACADIA 2022.
🦾 🎤 🏠
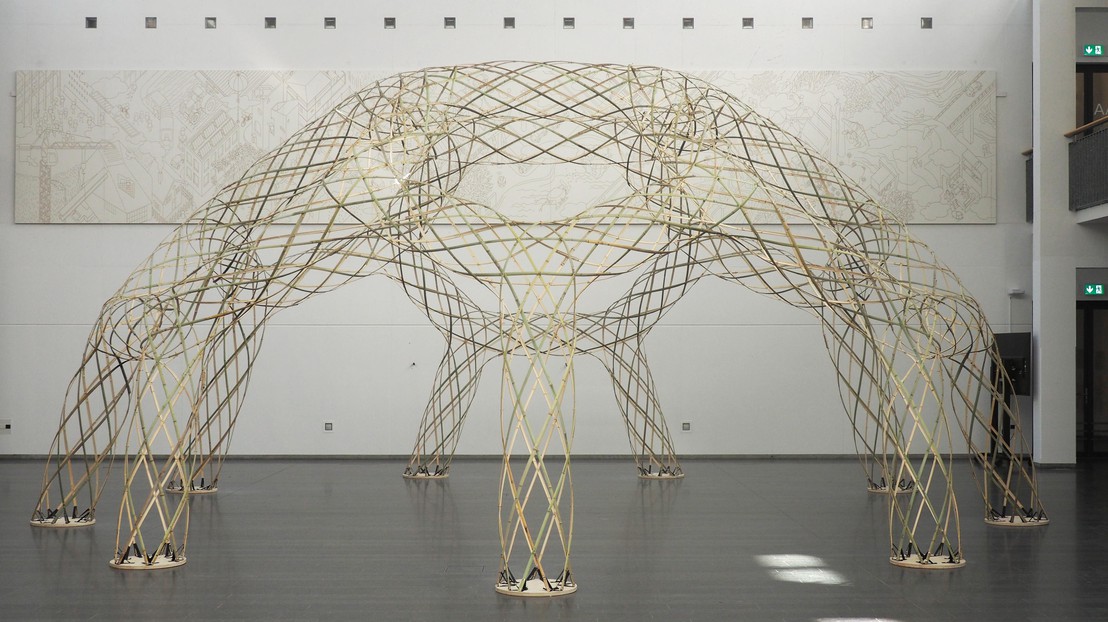
In collaboration with GCM, ITKE and an independent artist, the CRCL unveils a lightweight bamboo structure, BamX, at the heart of the Architecture faculty building.
🕸 🎍 🕸
Stefana was invited to give a lecture on multi-agent robotic processes at CIS. The recording is now available to watch online.
🎤 👩💻 💬
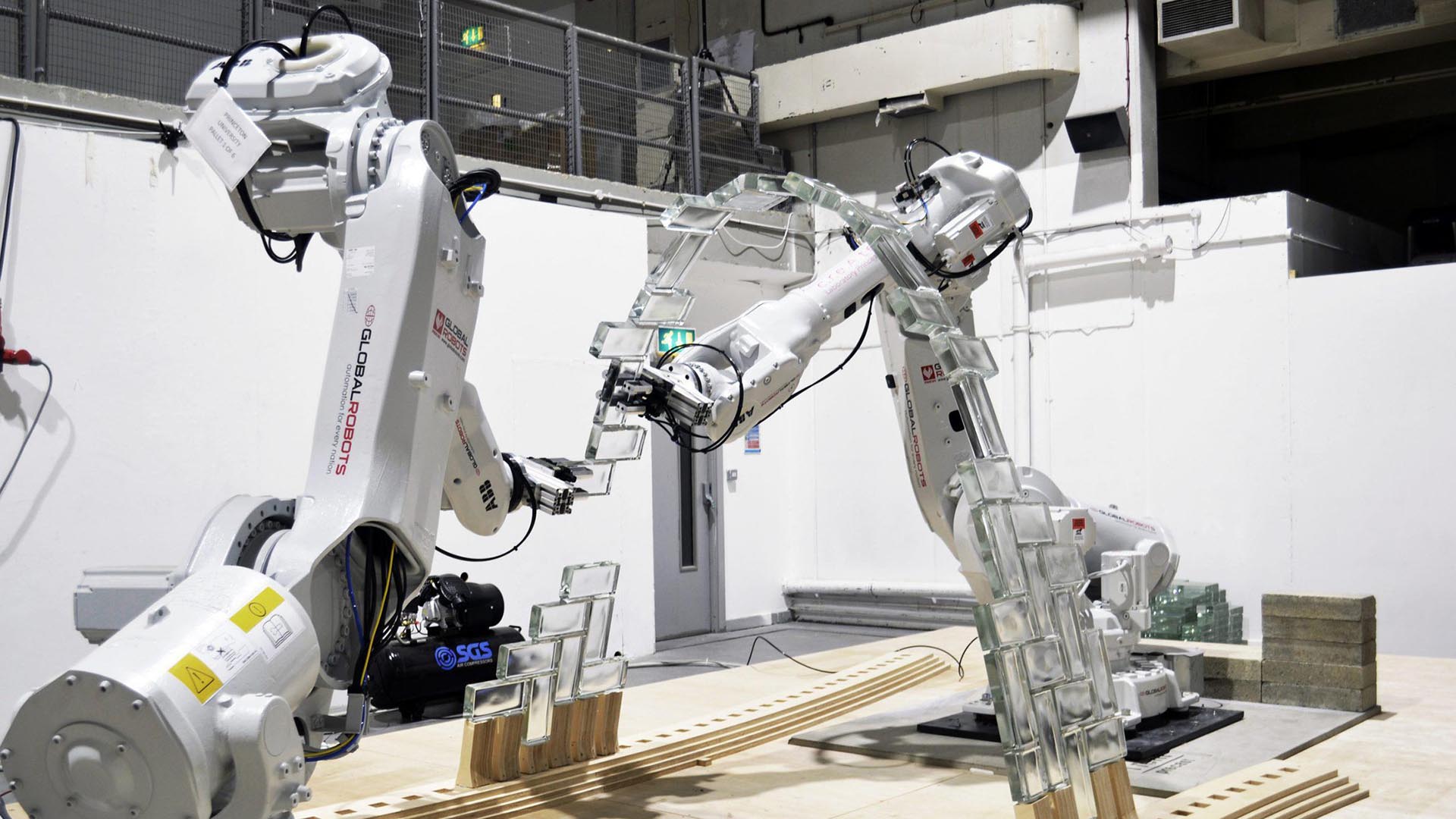
Congrats to Isla Han, Edvard Bruun and Stefana Parascho for making this unique collaborative project happen.
🏆 💎 🏆
We are teaching a workshop at this year’s ACADIA conference together with Gramazio Kohler Research, ETH Zurich - Controlling robots remotely through COMPAS FAB. Join us by registering here!! 🤖 👩 💻
Skevaki, Eleni, Eric Duong, Hong-Bin Yang, and Stefana Parascho. 2025. “Truss from Trash: A Human–Robot Framework for Adaptive Timber Assembly on the Construction Floor.” Construction Robotics 10 (1): 2. https://doi.org/10.1007/s41693-025-00175-9.
Wang, Qianqing, Jingwen Wang, Bryan German Pantoja Rosero, Katrin Beyer, and Stefana Parascho. 2025. “Dynamic Planning and Assembly for Constructing Mortar-Joint Multi-Leaf Stone Masonry Walls with a Robotic Arm.” 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October, 4873–80. https://doi.org/10.1109/IROS60139.2025.11246708.
Wang, Ziqi, Wenjun Liu, Jingwen Wang, Gabriel Vallat, Fan Shi, Stefana Parascho, and Maryam Kamgarpour. “Learning to Assemble with Alternative Plans.” ACM Transactions on Graphics 44, no. 4 (2025): 1–16. https://doi.org/10.1145/3730824.
Fivet, Corentin, Stefana Parascho, Maxence Grangeot, and Malena Bastien-Masse. “Disused Concrete, Digital Acupuncture and Reuse.” Architectural Design 94, no. 5 (2024): 88–97. https://doi.org/10.1002/ad.3101.
Settimi, Andrea, Damien Gilliard, Eleni Skevaki, et al. “DiffCheck: A Scan-CAD Evaluation Tool for Digital Manufacturing and Assembly Processes in Timber Construction.” In Structures and Architecture: REstructure REmaterialize REthink REuse, edited by Mario Rinke and Marie Frier Hvejsel. CRC Press, 2025. https://doi.org/10.1201/9781003658641-83.
Grangeot, Maxence, Tanguy Auffret-Postel, Stefana Parascho, and Corentin Fivet. “New Tectonics of Concrete through Rubble Reuse.” In Structures and Architecture, 1st ed., by Mario Rinke and Marie Frier Hvejsel. CRC Press, 2025. https://doi.org/10.1201/9781003658641-141.
Grangeot, Maxence, Maléna Bastien Masse, Stefana Parascho, and Corentin Fivet. “Concrete Rubble as a New Structural Construction Material: Opportunities of Digital Processes with Existing Tools.” Buildings Building Materials, and Repair&Renovation, no. Advances in Concrete Technology for Sustainable Architecture (2024). https://doi.org/10.3390/buildings15091437.
Grangeot, Maxence, Malena Bastien-Masse, Corentin Fivet, and Stefana Parascho. “Large Concrete Rubble as a New Structural Construction Material: Opportunities and Digital Processes for Load-Bearing Walls.” Buildings 15, no. 9 (2025): 1437. https://doi.org/10.3390/buildings15091437.
Skevaki, Eleni, Marirena Kladeftira, Alexandra Pittiglio, and Stefana Parascho. “Assembly of Spaceframes in Hybrid Teams: Adaptive Digital Fabrication Workflows for Human-Robot Collaboration.” June 2024. https://doi.org/10.52842/conf.caadria.2024.3.291.
Grangeot, M, C Fivet, and S Parascho. “From Concrete Waste to Walls: An Investigation of Reclamation and Digital Technologies for New Load-Bearing Structures.” Journal of Physics: Conference Series 2600, no. 19 (2023): 192019. https://doi.org/10.1088/1742-6596/2600/19/192019.
Vallat, Gabriel, Jingwen Wang, Anna Maddux, Maryam Kamgarpour, and Stefana Parascho. “Reinforcement Learning for Scaffold-Free Construction of Spanning Structures.” In Proceedings of the 8th ACM Symposium on Computational Fabrication, 1–12. SCF ’23. New York, NY, USA: Association for Computing Machinery, 2023. https://doi.org/10.1145/3623263.3623359.
Wang, Jingwen, Wenjun Liu, Gene Ting-Chun Kao, Ioanna Mitropoulou, Francesco Ranaudo, Philippe Block, and Benjamin Dillenburger. “Multi-Robotic Assembly of Discrete Shell Structures.” In Multi-Robotic Assembly of Discrete Shell Structures, 261–74. De Gruyter, 2023. https://doi.org/10.1515/9783111162683-020.
Duong, Eric, and Stefana Parascho. “Social Signals: An Adaptive Installation for Mediating Space During COVID-19 and Beyond.” In Computer-Aided Architectural Design. INTERCONNECTIONS: Co-Computing Beyond Boundaries, edited by Michela Turrin, Charalampos Andriotis, and Azarakhsh Rafiee, 547–61. Communications in Computer and Information Science. Cham: Springer Nature Switzerland, 2023. https://doi.org/10.1007/978-3-031-37189-9_36.
Han, Isla Xi, and Stefana Parascho. 2023. ‘Improv-Structure: Exploring Improvisation in Collective Human-Robot Construction’. In Trends on Construction in the Digital Era, edited by António Gomes Correia, Miguel Azenha, Paulo J. S. Cruz, Paulo Novais, and Paulo Pereira, 233–43. Cham: Springer International Publishing.
Bruun, Edvard, Erin Besler, Sigrid Adriaenssens and Stefana Parascho. 2022. “Towards Computing Cooperative Robotic Sequences for the Disassembly and Reuse of Timber Frame Structures.” In ACADIA 2022 Hybrids and Haeccieties: Proceedings of the 41st Annual Conference of the Association for Computer Aided Design in Architecture.
Parascho, Stefana. 2022. “From Automation to Collaboration: A Review of Construction Robotics”. In Annual Review of Control, Robotics and Autonomous Systems.
Pastrana, Rafael, Patrick Ole Ohlbrock, Thomas Oberbichler, Pierluigi D’Acunto, Stefana Parascho. 2022. “Constrained Form-Finding of Tension-Compression Structures using Automatic Differentiation.” In Computer Aided Design.
Han, Isla Xi, Forrest Meggers and Stefana Parascho. 2021.”Bridging the Collectives: A Review of Collective Human-Robot Construction.” In International Journal of Architectural Computing.
Huang, Yijiang, Caelan R. Garrett, Ian Ting, Stefana Parascho, and Caitlin T. Mueller. 2021. “Robotic Additive Construction of Bar Structures: Unified Sequence and Motion Planning.” Construction Robotics (2021), Springer. https://doi.org/10.1007/s41693-021-00062-z
Bruun, Edvard, Rafael Pastrana, Vittorio Paris, Alessandro Beghini, Attilio Pizzigoni, Stefana Parascho and Sigrid Adriaenssens. 2021. “Three cooperative robotic fabrication methods for the scaffold-free construction of a masonry arch.” In Automation in Construction 129(6), Elsevier. https://doi.org/10.1016/j.autcon.2021.103803
Parascho, Stefana, Isla Xi Han, Samantha Walker, Alessandro Beghini, Edvard Bruun and Sigrid Adriaenssens. 2020. “A Cooperative Robotic Assembly Method for Compression-Only Vault Construction.” In Construction Robotics 4 (2020), pp. 117- 126, Springer. https://doi.org/10.1007/s41693-020-00041-w
Bruun, Edvard P. G., Ian Ting, Sigrid Adriaenssens, and Stefana Parascho. 2020. “Human– Robot Collaboration: A Fabrication Framework for the Sequential Design and Construction of Unplanned Spatial Structures.” Digital Creativity 31 (4): 320–36. https://doi.org/10.1080/14626268.2020.1845214
Han, Isla Xi, Edvard Bruun, Alessandro Beghini, Samantha Walker, Sigrid Adriaenssens and Stefana Parascho. 2020. “From Concept to Construction: A Transferable Design and Robotic Fabrication Method for a Building-Scale Vault.” In ACADIA 2020: Distributed Proximities, Proceedings of the 40th Annual Conference of the Association for Computer Aided Design in Architecture.
Parascho, Stefana, Isla Xi Han, Alessandro Beghini, Masaaki Miki, Samantha Walker, Edvard Bruun and Sigrid Adriaenssens. 2021. “LightVault.” In AAG 2020: Advances in Architectural Geometry.
Vittorio, Paris, M. Lepora, Alessandro Beghini, Stefana Parascho and Sigrid Adriaenssens, 2020. “Robotic construction of a self-balancing glass masonry vault: DEM study of the stability during the construction stages.”, In IASS Annual Symposium and Spatial Structures Conference 2020/21
Beghini, Alessandro, Samantha Walker, Masaaki Miki, Isla Xi Han, Sigird Adriaenssens and Stefana Parascho, 2021. “Robotic construction of a self-balancing glass masonry vault: Design and Tessellation.” In IASS Annual Symposium and Spatial Structures Conference 2020/21 (accepted)
Gandia Augusto, Stefana Parascho, Romana Rust, Gonzalo Casas, Fabio Gramazio, Matthias Kohler (2019) “Towards Automatic Path Planning for Robotically Assembled Spatial Structures.” In ROBARCH - Robotic Fabrication in Architecture, Art and Design, edited by Willmann J., Block P., Hutter M., Byrne K., Schork T. Springer, Cham. https://doi.org/10.1007/978-3-319-92294-2_5
Piškorec Luka, David Jenny, Stefana Parascho, Hannes Mayer, Fabio Gramazio, Matthias Kohler (2019) “The Brick Labyrinth.” In ROBARCH - Robotic Fabrication in Architecture, Art and Design, edited by Willmann J., Block P., Hutter M., Byrne K., Schork T. Springer, Cham. https://doi.org/10.1007/978-3-319-92294-2_37
Parascho, Stefana, Thomas Kohlhammer, Stelian Coros, Fabio Gramazio and Matthias Kohler. 2018. “Computational Design of Multi-Robotically Assembled Spatial Structures.” In AAG - Advances in Architectural Geometry 2018, pp. 112–139, edited by Lars Hesselgren, Axel Kilian, Olga Sorkine Hornung, Samar Malek, Karl-Gunnar Olsson, and Christopher John Kenneth Williams, Göteborg, Sweden: Klein Publishing GmbH. https://research.chalmers.se/en/publication/504188
Parascho, Stefana, Augusto Gandia, Ammar Mirjan, Fabio Gramazio and Matthias Kohler. 2017. “Cooperative Fabrication of Spatial Metal Structures.” In Fabricate 2017, pp. 24-29, edited by Achim Menges, Bob Sheil, Ruairi Glynn and Marilena Skavara, London: UCL press, ISBN: 978-1-78735-001-4, www.jstor.org/stable/j.ctt1n7qkg7.7
Parascho, Stefana, Jan Knippers, Moritz Dörstelmann, Marshall Prado and Achim Menges. 2014. “Modular Fibrous Morphologies: Computational Design, Simulation and Fabrication of Differentiated Fibre Composite Building Components.” In AAG - Advances in Architectural Geometry 2014, pp. 29-45, edited by Philippe Block, Jan Knippers, Niloy J. Mitra, Wenping Wang, Springer, ISBN 978-3-319-11418-7, DOI: https://doi.org/10.1007/978-3-319-11418-7_3
Dörstelmann, Moritz, Stefana Parascho, Marshall Prado, Jan Knippers and Achim Menges. 2014. “Integrative Computational Design Methodologies for Modular Architectural Fiber Composite Morphologies.” In ACADIA 2014 Design Agency: Proceedings of the 34th Annual Conference of the Association for Computer Aided Design in Architecture, pp. 219-228, edited by David Gerber, Alvin Huang and Jose Sanchez, ACADIA and Riverside Architectural Press, ISBN 978-1-926724-49-2, DOI: https://doi.org/10.13140/2.1.5186.0485
Parascho Stefana. 2024. “Design Space Explorations: On the role of visualisation in architectural fabrication and design.” book chapter, in Bio/Matter/Techno/Synthetics, University of Pennsylvania.
Grangeot, Maxence, Corentin Fivet, and Stefana Parascho. “Digital Upcycling: New Tectonics for Architecture.” In Transcalar Prospects in Climate Crisis. 2024.
Duong, Eric and Stefana Parascho. “Motion Pictures.” In Transcalar Prospects in Climate Crisis. 2024.
Parascho Stefana. 2023. “Beyond Optimization: Interaction as a Means to Resituate Digital Fabrication.” book chapter, in Homing the Machine.
Bruun, Edvard, Stefana Parascho and Sigrid Adriaenssens. 2023. “Cooperative Robotic Fabrication for a Circular Economy.” book chapter, in Circular Built Environment in the Digital Age. Edited by Catherine De Wolf, Sultan Çetin, and Nancy Bocken.
“Toward Critical Computation - Proceedings of ACADIA 2021.” book, published 2022. Edited by Kathrin Doerfler, Stefana Parascho and Jane Scott. Role: Editor.
Parascho Stefana. 2021. “Home Position”, book chapter, in Design Studio Vol. 2: Intelligent Control 2021: Disruptive Technologies: 2021, edited by Rob Hyde and Filippos Filippidis, RIBA Publishing.
Parascho, Stefana “Cooperative Robotic Assembly. Computational Design and Robotic Fabrication of Spatial Metal Structures.” ETH Zurich, 2019. DOI: https://doi.org/10.3929/ethz-b-000364322
Parascho Stefana. 2023. “Invisible Motions” Drawing Codes – Experimental Protocols of Architectural Representation, Applied Research + Design.
Parascho Stefana. 2018. “Integrative Architekturmodelle” Kunst + Architektur, nr. 2018.4. Gesellschaft für Schweizerische Kunstgeschichte, Berne, Switzerland. ISBN: 978-3- 03797-345-5
Parascho, Stefana. 2017. “Un labirint de caramida.” igloo habitat & architectura, nr. 179, Aug- Sep 2017. pp. 138-141. Igloo Media, Bucharest, Romania.
Research
Research by Gabriel Vallat on training robots to build structures from specifications
🤖📝🏗️
A collection of collaborative robotics projects developed by Eleni Skevaki
🤖📱🤖
Research by Maxence Grangeot on upcycling large irregular concrete rubble pieces from demolition sites into walls
🪨🏗️🪨
Human-robot adaptive workflows for disassembly, repair, and construction
🏫🤖🏠
Research by Marie-Pierre on the relationship between the human hand and tools for making, both new and old
🪨⚒️🪨
Human-robot fabrication workflow for the use of curved wood in construction by Alberto Johnsson
🪵💻🪵
An upcoming manuscript on the unrealized dream of construction automation
🌐 📖 🌐
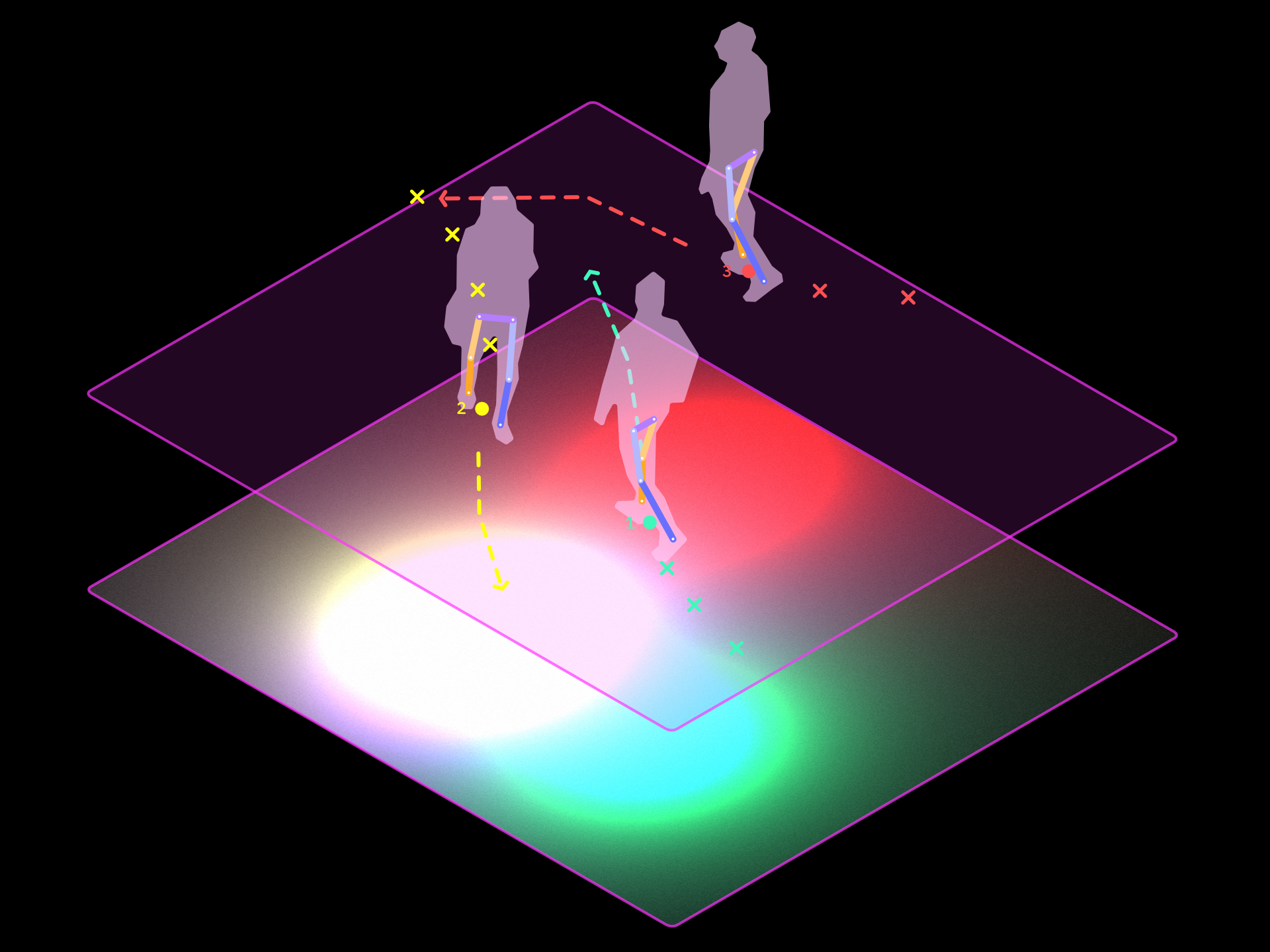
An interactive installation that brings together building occupancy analysis methods, trajectory prediction, and digital media to understand and mediate shared spaces
🔮 🚧 🔮
A platform dedicated to beginner-friendly creative coding tutorials and exercises for building architecture with robots
🏫 🤖 🏫
Teaching
Student Projects
NEW
📸 Alberto Johnsson
We'll add some topic ideas soon, but in the meantime you can see projects that previous students have completed with us. Of course if you have any ideas related to robots, digital fabrication, design software, and computation feel free to reach out and discuss more with us!
Capitalizing on Uncertainty — Structures, Processes, Mindsets is a 6-day summer school for EPFL & ETHZ PhD and Master students, exploring how uncertainty can be engaged as a productive resource in design and fabrication.
More details on the program, dates, and registration are available on on the course website
A weeklong course on daylight analysis using Grasshopper
January 2024
🦗☀️🦗
Spring 2023
🤖🎨🤖
Find materials for computational design and building with robots on the LE-AR-N website!.
Ongoing
🖥️🧠🖥️
Team
Dalila Romero ZenkerScientific Assistant
Dalila is a scientific assistant at CRCL, working on human–robot collaboration in adaptive timber structures. She holds an Integrated Master’s degree in Architecture and a MAS in Architecture and Digital Fabrication from ETH. She has worked professionally in Switzerland and abroad on projects ranging from new construction to heritage‑protected buildings. Her research interests include computational fabrication, material‑driven design, and circular construction across contemporary and heritage contexts.
Beyond the lab 🐱🐈📚⛷️🩰🖼️🐈⬛
Eleni SkevakiDoctoral Assistant
Eleni Skevaki is a doctoral researcher at the Lab for Creative Computation (CRCL) of EPFL Lausanne and associated with the National Centre for Competence in Research – Digital Fabrication, where she explores human-robot interaction within heterogeneous construction teams. 🤖 She holds an integrated Master in Architectural Engineering from the National Technical University of Athens and an MAS in Architecture and Digital Fabrication from ETH Zurich.🎓 Her working shoes are still dirty from spending too much time next to a 3D concrete printing robot. 🥾
Eric DuongScientific Assistant
📸 Ian Ting
Eric is a scientific assistant at CRCL working on human-robot interfaces and interactive installations. He studied architecture and computer science at the University of Virginia, where he discovered creative coding through Processing and Grasshopper. 🖌 Today he goes between visual toolkits, computer vision libraries, and robotics toward building spatial experiences and experimental applications. 🚧 Outside of the lab, he enjoys backpacking, cycling, and making things. 🏕
Gabriel VallatDoctoral Assistant
📸 Alex Pittiglio
Gabriel is a PhD student at CRCL and Sycamore lab. He’s working on multi-agent reinforcement learning in a collaborative setting. 🦾🫂
He has obtained a bachelor’s degree in micro-engineering and a master’s in robotics, both at the EPFL. During his civilian service, he worked as a data analyst in aquatic ecology at EAWAG, where he used deep neural networks to predict the evolution of plankton populations. 🦠🦆
If you don’t see him in the office, you could try to catch him climbing or running outside 🧗♂️👣, or at Unipoly, where he tries to avoid conflicts by working as a mediator. 🕊️
Jingwen WangDoctoral Assistant
📸 Eric Duong
Jingwen is a Ph.D. student at the CRCL. She is trained as a structural engineer and holds a B.Eng degree from HKUST and a M.Eng degree from MIT, both in Civil and Environmental engineering. After graduation, she worked in the New York office of Skidmore, Owings and Merrill for three years as a structural engineer, where she contributed to 15 projects worldwide. Notable projects she has worked on include Kempegowda International Airport Terminal II, MIT – Stephen A. Schwarzman College of Computing, NYC Penn Station Entrance Canopy.
In 2021, she decided to pursue her interest in fabrication-related research. She came to Europe and did a Master of Advanced Studies in Architecture and Digital Fabrication at ETH Zurich. She still considers herself as a structural engineer at heart, but also loves design, robotics and architecture.
In her free time, she likes walking around the city, taking photographs and watching films.
Marie-Pierre ZuffereyScientist
Marie-Pierre Zufferey is an architect dipl. EPFL, Doctor of Science, and scientific collaborator at CRCL. She has focused on geometry and stereotomy (stone-cutting) for a long time. Now she aims to tame robots and use them as tools that directly extend the human hand and spirit as pencil, brush, bow, and chisel toward investigating the links between representing and creating, and how to make these new technologies accessible for non-specialists.
Unexepected interactions could emerge with her many outside activities, like martial arts, carving, painting, entomological and botanical observations, and reading!
Maxence GrangeotDoctoral Assistant
“ChatGPT, please write a funny short bio with emojis of a young phd researcher interested in the duality of architecture and structural engineering, of material properties and structural form, of vernacular crafts and scientific research, of construction processes and available technologies, and playing with all kind of tools, from bespoke analog jigs to robotics arms and cranes, desperately trying to discover novel architectural tectonics and structural typologies from reclaimed materials. Thank you!”
Stefana ParaschoLaboratory Director
📸 Mathias Bernhard
Stefana Parascho is the Director of the Lab for Creative Computation (CRCL).
Stefana studied in Stuttgart and received her Doctorate degree from ETH Zurich, Gramazio Kohler Research. She is an Assistant Professor at EPFL and makes sure that the robots and students in the lab don’t get bored. 💃 🤖 🕺 When she’s not in the lab, she is probably in a dance class or travelling (except during pandemics). She fights to see more recognition for women in STEM fields and hopes to never get stuck on a fixed research idea.
Bio
Stefana Parascho is a researcher, architect, and educator whose work lies at the intersection of architecture, digital fabrication and computational design. She is currently an Assistant Professor at EPFL where she founded the Lab for Creative Computation.
Through her research, she has explored multi-robotic fabrication methods and their relationship to architectural design. Stefana investigated computational design techniques ranging from agent-based systems to sequential design and optimisation methods. Her goal is to strengthen the connection between design, structure, and fabrication, and boost the interdisciplinary nature of architecture through the development of accessible computational tools and robotic fabrication methods.
Before joining EPFL, Stefana was an Assistant Professor at Princeton University, where she led the CREATE Lab Princeton. She completed her doctorate in 2019 at ETH Zurich, Gramazio Kohler Research. Previously, she received her Diploma in Architectural Engineering from the University of Stuttgart and worked with DesignToProduction Stuttgart and Knippers Helbig Advanced Engineering.